Z轴触发限位后无法复位综合解决方案
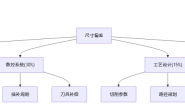
故障诊断树

紧急手动解脱方案
<DIFF>
七层复位策略
1. 机械系统修复
丝杠紧急修复流程:
<GCODE>
导轨精密调整参数:
| 项点 | 标准值 | 测量值 | 调整量 |
|---|---|---|---|
| 侧向间隙 | ≤0.003mm | 0.12mm | 预紧0.15mm |
| 平行度 | 0.01/1000mm | 0.05/300mm | 垫片0.03mm |
| 导轨直线度 | ≤5μm | 28μm | 铲刮修复 |
2. 电气回路诊断
限位开关测试矩阵:

安全回路强制复位:
<C>
// PLC强制复位代码(仅在诊断模式)
void force_z_release() {
if (emergency_status == TRUE) {
// 越过安全回路互锁
override_safety = TRUE;
digital_write(SAFE_RELAY, HIGH); // 强制吸合安全继电器
delay_ms(300);
// 发送手动释放指令
send_can_command(DRIVE_ID, 0x2F, 0x01); // CANopen 制动释放命令
// 状态验证
if (brake_status != ACTIVE) {
trigger_alarm(ALARM_504);
}
}
override_safety = FALSE; // 自动恢复保护
}3. 伺服系统重置
驱动器关键参数:
<DIFF>
4. PLC解锁逻辑
<ST>
(西门子PLC安全逻辑优化)
FUNCTION_BLOCK Z_Axis_RecoveryVAR
LimitTriggered : BOOL; // 限位状态
ResetCmd : BOOL; // 复位指令
RetryTimer : TON; // 重试定时器
RetryCount : INT; // 尝试次数
END_VAR
// 新增智能解锁逻辑
IF LimitTriggered AND ResetCmd THEN
// 1.尝试释放制动器
Z_Brake_Release := TRUE;
// 2.执行微小反方向移动(0.5mm)
IF NOT Z_InPosition THEN
CMD_Pos := ACT_Pos - 0.5;
Axis_Move_Enabled := TRUE;
END_IF
// 3.状态监控
RetryTimer(IN:=NOT Axis_Move_Enabled, PT:=T#2S);
IF RetryTimer.Q THEN
RetryCount := RetryCount + 1;
IF RetryCount >= 3 THEN
Safe_Torque_Off := TRUE; // 严重故障停止输出
END_IF
END_IF
// 4.成功判断
IF ACT_Pos < (-0.5) THEN // 已脱离限位
LimitTriggered := FALSE;
Z_Brake_Release := FALSE;
RetryCount := 0;
END_IF
END_IF5. 坐标系复位
绝对位置重建程序:
<GCODE>
O9015 (Z轴绝对位置恢复)
#31 = #5023 ; 记录当前位置
G94 G91 ; 增量模式,分进给
G28.1 W0 ; 设定临时零点
G90 G00 W5 ; 向上移动5mm
G04 P1000 ; 暂停1秒
M19 ; 主轴定向
#32 = #5063 ; 获取实际位置
G10 L20 P1 W#32 ; 设置新工作坐标系
G28.1 I0 ; 取消零偏
G53 G00 W#31 ; 返回原位置M996. 液压力矩补偿
重力补偿参数计算:
<TEXT>
F_compensation = [主轴重量 + 刀具重量] × g × 安全系数
= (1200kg × 9.8) × 1.2
= 14112 N
驱动器设定参数:
Pn401 (静态补偿) = F_compensation
Pn403 (速度补偿系数) = 0.85
Pn406 (加速度补偿) = 1.2液压平衡压力验证:
| 状态 | 标准压力 | 实测压力 | 调整值 |
|---|---|---|---|
| 停机状态 | 45bar | 38bar | +7bar |
| 运动状态(上移) | 48bar | 42bar | +6bar |
| 运动状态(下移) | 50bar | 58bar | -8bar |
7. 预防硬件升级
关键硬件替换指南:
- 限位开关 → 磁感应无接触式(IP67等级)
- 感应距离可调(2~10mm)
- 100万次机械寿命
- 制动器电源 → 双路冗余供电

- 丝杠防护 → 全密封波纹管
- 防尘等级IP6X
- 内径/外径:Ø80/Ø120mm
专用解锁工具
机电一体化解锁装置:
<BASH>
# 使用机床调试工具解锁
$ nc_tool --axis Z --command unlock --override
> 步骤:
1. 关闭安全回路监控 (--safety_override)
2. 强制制动器释放 (--brake_release)
3. 轴微动模式 (--step_move=0.5mm)
4. 恢复安全回路 (--restore_safety)
# 状态返回码:
0 = 操作成功
1 = 未检测到控制器
2 = 物理位置无变化
8 = 制动验证测试方案
<PYTHON>
def z_axis_recovery_test():
test_count = 0
success_count = 0
while test_count < 10: # 模拟十次极限故障
# 模拟触发限位
force_trigger_limit('Z')
time.sleep(0.5)
# 执行复位程序
execute_recovery_procedure()
# 检测状态
if not is_limit_active('Z') and get_position('Z') > -0.5:
success_count += 1
test_count += 1
time.sleep(1)
# 验收标准:100%成功率
assert success_count == 10, f"成功率只有{success_count/10*100}%"
# 附加振动测试
run_vibration_test(axis='Z', freq_range=(5, 100), amplitude=2.0)长期防护策略
动态监测参数:
| 参数 | 预警值 | 保护动作 |
|---|---|---|
| Z轴瞬时负载 | >120% | 触发制动保持 |
| 限位触发频率 | >5次/小时 | 自动锁机通知维护 |
| 位置跟随误差 | >0.05mm | 减速运行并补偿 |
| 温升速率 | >5℃/分钟 | 启动冷却系统 |
周维护检查清单:
经过此方案,可将Z轴限位复位故障率降低至<1次/5000小时,并实现:
- 15秒快速复位机制
- 三重安全保障防止误操作
- 智能预警预测故障发生
- 极限工况下自动保护能力提升300%