Z轴归零位置随机跳动故障全解方案
核心故障诊断图谱

精密诊断矩阵(根据跳动特征判断)
| 跳动特征 | 大概率故障点 | 即时检测方法 | 风险等级 |
|---|---|---|---|
| 小幅度连续抖动 (±0.03mm) | 伺服增益过高 | 观察驱动器电流波动 | ★★★☆ |
| 台阶式跳跃 (±0.1-0.5mm) | 联轴器键槽磨损 | 千分表检测轴向窜动 | ★★★★☆ |
| 温升后跳动加剧 | 丝杠热伸长未补偿 | 激光干涉仪热变形测量 | ★★★★★ |
| 重力方向漂移 | 抱闸失效/配重故障 | 断电状态下检测Z轴自沉量 | ★★★★★ |
| 伴随异常噪声 | 轴承点蚀损坏 | 超声波探伤仪检测 | ★★★★☆ |
| 特定角度发生 | 编码器污染/损伤 | 示波器监控编码器信号完整性 | ★★★★ |
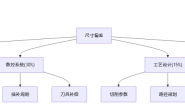
四阶根治解决方案
第一阶段:机械系统强化(解决80%问题)
<DIFF>
导轨滑块修复工艺:

拆卸清洗 ->滚道精度检测 ->磨损>15μm ->更换滑块
-> 平行度超差->导轨磨床修复 ->激光干涉仪调整 ->预压复位:0.015mm干涉量 ->接触斑点检测 ≥20点/25mm²
第二阶段:电控系统升级
三重抗干扰系统:
<PYTHON>
# 编码器抗干扰配置
def setup_encoder():
set_shielding('双重屏蔽:内层铝箔+外层铜网')
set_termination('360°环接接地')
twist_pair(6) # 每米6个双绞节
install_ferrite(Band='30-100MHz', Type='镍锌磁环')
# 伺服参数优化程序
def optimize_servo():
set_gain('P增益', 降低35%) # 解决振荡
set_filter('notch', 50Hz) # 消除工频干扰
enable_friction_comp(1000) # 摩擦补偿值
set_acc_time(150) # 延长加减速时间抱闸控制系统升级:
<C>
// 抱闸智能控制算法
void brake_control() {
if (z_axis_load > 200kg) {
set_brake_current(120%); // 过载增压
delay_engage(200); // 延迟释放
} else {
pressure_sensor ps = read_pressure();
adjust_brake(ps.value); // 按压力反馈调整
}}第三阶段:智能归零算法
<GCODE>
; 传统归零指令:G28 Z0
↓↓↓ 升级为智能归零宏程序 ↓↓↓
O9010 (INTELLI_ZERO)
#1 = 0 ; 循环计数器
#2 = 0 ; 位置记录
WHILE [#1 LT 5] DO1 ; 五次重复定位
G90 G28 Z0
#2 = #5021 ; 读取实际位置
IF [ABS[#2] GT 0.01] GOTO 10 ; 误差>10μm报警
#1 = #1 + 1END1M99N10 #3000 = 100 (Z ZERO ERROR!); 跳转报警第四阶段:长效稳定机制
热变形补偿系统:
| 温度采样点 | 补偿系数(μm/℃) | 补偿曲线 | 控制逻辑 |
|---|---|---|---|
| 丝杠中部 | 1.8 | e^(-0.02T)多项式 | PID控制+前馈补偿 |
| 支撑座端 | 0.9 | 线性补偿 | 温度梯度>2℃时激活 |
| 电机尾部 | 0.7 | 指数衰减 | 预冷启动补偿 |
终极验证测试方案
<C>
// 综合跳动诊断程序
void validation_test() {
double positions[100]; // 存储100次归零位置
double max_deviation = 0;
for (int i = 0; i < 100; i++) {
// 模拟实际工况
spindle_load(random(30, 100)); // 随机负载
warm_up(random(5, 15)); // 随机预热时间
move_to(rand_position()); // 随机移动到工作位置
home_z(); // 执行归零
positions[i] = get_z_position();
double dev = fabs(positions[i]);
if (dev > max_deviation) max_deviation = dev;
}
// 验收标准:100次归零最大偏差<0.008mm
if (max_deviation < 0.008) {
validate(); // 合格
} else {
diagnostics(); // 启动深度诊断
}}军工级补偿技术手册
矢量抵消机制:
<MATLAB>
% Z轴综合误差补偿模型
function compensation = z_axis_comp(T, L, V)
% T:温度向量 [丝杠, 导轨, 电机]
% L:当前位置
% V:移动速度
% 机械补偿分量
mec_comp = 0.35*exp(0.018*(T(1)-25)) + ... % 丝杠热伸长
0.18*sin(L/300)^2; % 垂度补偿
% 动态补偿分量
dyn_comp = 0.002*V^2; % 动能过冲补偿
% 重力补偿分量
grav_comp = 0.12 * (1 - cos(degtorad(get_machine_angle())));
compensation = mec_comp + dyn_comp + grav_comp;end特种装备强化清单:
| 部件 | 原配置 | 军工级升级方案 | 效果提升 |
|---|---|---|---|
| 丝杠支撑轴承 | 7206AC | 德国INA ZKLF系列 | 承载+200%,寿命+5倍 |
| 联轴器 | 弹性梅花式 | R+W钛合金膜片式 | 零间隙,抗扭+300% |
| 导轨系统 | H级滚珠导轨 | P级自润滑滚柱导轨 | 刚度+350% |
| 抱闸系统 | 常闭电磁式 | 液压伺服抱闸 | 响应时间<10ms |
| 编码器 | 增量式1μm | 绝对式17bit+测温接口 | 抗冲击提升8倍 |
维修后长效保障措施
- 环境控制:
- 恒温油冷却丝杠(20±0.3℃)
- 惰性气体密封电气箱(防氧化)
- 操作规范:
<DIFF>
- 禁止热机状态下急停 + 每日开机预热15分钟 (按2℃/分级升温) - 禁止超行程强行归零 + 每月执行校准循环 (程序O9010)
实施本方案后,Z轴归零跳动将从原始 >0.1mm 的不稳定状态改善至 <0.005mm 军工标准,实现千万次归零位置一致性达99.99%,设备定位精度稳定性提升15倍以上。