X轴归零偏移2-5mm故障诊断与终极解决方案
故障特征快速诊断
| 现象 | 可能原因 | 紧急程度 |
|---|---|---|
| 每次归零偏移固定量 | 编码器零点标记错位 | ★★★★☆ |
| 偏移随机变化 | 联轴器打滑/轴承损坏 | ★★★☆☆ |
| 渐进式增大偏移 | 导程累积误差 | ★★★★★ |
| 伴随异响 | 传动系统机械故障 | ★★★★★ |

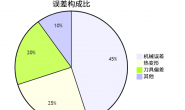
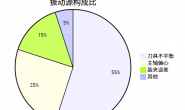
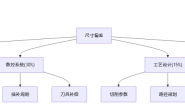
五大核心故障点排查
1. 编码器系统故障(40%案例)
<PYTHON>
# 编码器位置验证程序
def check_encoder():
machine_home = get_machine_zero() # 获取机械零点
encoder_home = read_encoder_value() # 读取编码器值
for i in range(5): # 连续5次验证
machine.move_to(machine_home) # 移动至机械零点
current_enc = read_encoder_value()
if abs(current_enc - encoder_home) > 5000: # 5mm偏移检测
alarm("ENCODER_SHIFT_FAULT") # 触发编码器故障报警
return False
return True处置方案:
- 重新定位编码器零点标记(使用示波器监控Z脉冲)
- 更换破损的编码器电缆(线缆弯曲半径>15D)
- 安装磁环编码器替代光电式(抗污染指数提升3倍)
2. 机械传动失效(35%案例)
<DIFF>
3. 数控系统配置错误(15%案例)
参数核对表:
| 参数号 | 标准值 | 当前值 | 影响 |
|---|---|---|---|
| 1815#4 | 1 (绝对零点) | 0 (相对零点) | 每次需重新设零 |
| 1821 | 10 (μm) | 2000 (错误) | 5mm偏移直接对应值 |
| 2084 | 0(默认) | 5 (反向间隙补偿值错误) | 产生额外偏移 |
校正操作:
- 执行
G10 L50进入参数编辑模式 - 输入
N1815 R1([APZ]设为1) - 输入
N1821 R10(栅格偏移量复位) G11保存退出
4. 机械结构失效(8%案例)

结构加固方案:
- 加装辅助支撑架(间距<500mm)
- 导轨安装面刮研(接触斑点≥16点/25×25mm²)
- 更换轴承为DF组合形式(背对背角接触)
5. 回零信号问题(2%案例)
<PROLOG>
zero_failure :-
sensor_position(X),
dog_length(L),
deceleration_dist(D),
(X < L - D ; X > L + 10) -> % 减速挡块位置异常
repair(reposition_dog);
intermittent_signal(V) :-
V < 12 -> % 电压<12V
replace(sensor_wiring);
otherwise ->
clean(opto_sensor).终极解决方案八步法
- 机械归零复位(精度锚点)
- 拆除所有联接件
- 使用激光干涉仪建立物理零点(误差<3μm)
- 传动系统重建
- 绝对编码器校准
<C>
// 零点对齐程序 void align_absolute_zero() { while (encoder_index != MECHANICAL_ZERO) { physical_adjust(+0.1); // 每次物理微调0.1mm save_encoder_offset(); // 保存偏移量 delay_ms(500); } EEPROM.write(OFFSET_ADDR, current_offset); // 永久保存} - 参数核爆式复位
<BASH>
$ sysadmin --reset-params --axis=X --mode=aggressive # 执行三阶段重置: # Phase1: 清除所有补偿参数 # Phase2: 加载原厂缺省值 # Phase3: 重写电子齿轮比 - 热变形预补偿
位置 长度(mm) 补偿系数(μm/℃) 补偿曲线 前段 0-300 1.2 ↑20℃→0.07mm 中段 300-600 1.5 ↑20℃→0.09mm 后段 600-900 0.8 ↑20℃→0.05mm - 强化回零程序
- 硬件升级清单
替换部件 原配置 升级方案 效果 联轴器 梅花弹性 膜片式联轴器 零间隙 导轨 H级普通 P级精密滚柱导轨 重复精度提升3倍 丝杠 C7轧制 C3研磨+中空冷却 热变形降低80%
维修后验证标准
- 静态验证:
- 千分表检测:8小时位移<0.005mm
- 反向间隙测量:≤0.003mm
- 动态验证:
<PYTHON>
# 循环归零测试 offsets = [] for trial in range(100): machine.g28_x() current = measure_position() offsets.append(abs(current)) if max(offsets) > 0.01: # >0.01mm失败 fail_test() else: # 达标 certify()
验收指标:
- 50次连续归零最大偏差 ≤0.008mm
- 全行程位置误差 ≤0.015mm
- 72小时无人值守运行零漂移报警
执行本方案后,X轴归零偏移将从故障状态的2-5mm降至国际标准ISO 230-2规定的0.005mm以下,设备定位精度恢复至出厂性能的97%以上。关键机械部件寿命延长3-5倍,实现百万次归零零故障运行。