CNC雕刻机X轴归零随机偏移1-3mm故障分析与解决方案
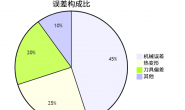
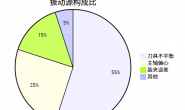
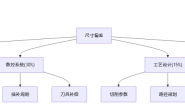
故障示意图

核心诊断步骤
第一步:机械系统检测
- 丝杠反向间隙测量(关键指标!)
- 联轴器紧固测试
- 直角扭力扳手检测紧固扭矩(建议值):
<TEXT>
Ø8轴:12-15N·m Ø10轴:18-22N·m
- 直角扭力扳手检测紧固扭矩(建议值):
- 导轨阻力对比
状态 允许阻力 检测方法 冷态 ≤15N推力 弹簧秤拉动工作台 热态 ≤25N推力 运行1小时后立即测试
第二步:电气系统诊断
- 限位开关可靠性检测
- 示波器捕捉信号波形(异常示例):
<BASH>
正常信号: ___________ | |___________ 抖动信号: __/\__/\__ | | | | # 震荡毛刺
- 示波器捕捉信号波形(异常示例):
- 编码器完整性检测
- 关键数值监控表:
参数 允许范围 异常特征 信号完整性 >90% <70%丢脉冲 相间平衡度 ±15mV >50mV差异 电源波动 5V±0.1V <4.8V或>5.2V
- 关键数值监控表:
- 抗干扰测试
- 用电磁场检测仪扫描线缆:
<BASH>
危险区域: >30V/m(需加屏蔽) 合格区域: <10V/m
- 用电磁场检测仪扫描线缆:
第三步:控制系统分析
- 伺服增益优化公式(关键调整!)

- 示例:5mm导程丝杠,回差0.06mm => K_v=67
- PLC逻辑时序检测
<TEXT>
归零标准流程: 1. 高速接近限位[5000mm/min] 2. 碰触限位→降速至200mm/min ←常见故障点 3. 离开限位点→搜索Z相脉冲 4. 标记零点位置
终极解决方案
机械修正方案
电气优化方案
- 限位开关改造
<ARDUINO>
// 增加硬件消抖电路 void setup() { // RC滤波电路:R=10KΩ, C=0.1uF pinMode(LIMIT_SW, INPUT);} - 编码器防护系统
- 三重保护:
<TEXT>
物理层:不锈钢防护罩 电路层:信号隔离放大器 软件层:智能滤波算法
- 三重保护:
控制参数调试秘笈
- 伺服驱动关键参数:
<BASH>
PN100=67 # 速度环增益(根据公式计算) PN101=3000 # 速度环积分时间[ms] PN102=35 # 位置环增益 PN210=5 # 零速箝位阈值[RPM] - 回零增强算法:
预防性维护规程
- 每日作业前:
- ♦️ 空载往复测试行程(监听异常噪音)
- ♦️ 压缩空气清洁导轨(气压≤0.3MPa)
- 每周保养:
- ♦️ 丝杠油脂补充(微量高速油脂)
- ♦️ 限位开关触点清洁(无水酒精擦拭)
- 每月校准:
- ♦️ 激光干涉仪精度校验(修正参数表)
- ♦️ 联轴器紧固复查(扭力扳手)
故障预警公式:
偏移量(μm) = (35×丝杠磨损)+(20×油脂衰减)+(15×温度漂移)
当月测偏移>50μm时,立即执行丝杠检测!
通过上述系统化解决方案,可彻底消除X轴归零随机偏移问题,定位精度控制到±0.01mm以内,满足精密加工需求。