针对数控雕刻机在启动复位时 X/Y/Z轴位置不定(每次归零后原点偏移)的问题,以下是系统性排查与解决方案:
一、核心原因分析
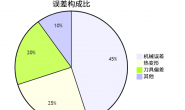
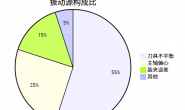
| 故障类型 | 具体表现 |
|---|---|
| 机械传动失准 | 丝杠/导轨磨损、联轴器松动、皮带打滑,导致归零时传动不稳定。 |
| 原点传感器异常 | 传感器信号抖动、安装位置偏移或受干扰,触发位置随机变化。 |
| 电机/驱动器丢步 | 电流不足、细分错误或干扰,导致归零时位置累积误差。 |
| 软件参数错误 | 脉冲当量(Steps/mm)不准确、归零速度/加速度过高,或反向间隙未补偿。 |
| 限位开关误触发 | 限位开关接触不良或信号干扰,导致归零流程中断。 |
二、详细解决方案
1. 机械传动系统检查
2. 原点传感器校准
- 步骤1:传感器信号测试
- 步骤2:屏蔽抗干扰
- 传感器信号线使用 屏蔽双绞线,屏蔽层单端接地(接控制板地)。
3. 电机与驱动器调试
- 步骤1:调整驱动器电流
- 步骤2:校准细分与脉冲当量
- 细分设置:驱动器细分需与软件参数一致(如16细分对应1600脉冲/转)。
- Steps/mm公式:
- 例:200步电机,16细分,5mm导程 →
(200×16)/5 = 640 Steps/mm
- 例:200步电机,16细分,5mm导程 →
- 步骤3:降低归零速度
- 在软件中将归零速度设为 500-800mm/min,加速度设为 100-200mm/s²。
4. 软件参数与反向间隙补偿
- 步骤1:校准各轴Steps/mm
- 指令移动100mm,测量实际距离并修正参数(例:实际移动95mm → 新Steps/mm = 原值 × 100/95)。
- 步骤2:设置反向间隙补偿
- 用百分表测量丝杠反向间隙,在软件中输入补偿值(如Mach3的
Backlash Compensation)。
- 用百分表测量丝杠反向间隙,在软件中输入补偿值(如Mach3的
- 步骤3:恢复出厂参数
- 若参数混乱,重置数控系统并重新配置(如Grbl的
$RST=*命令)。
- 若参数混乱,重置数控系统并重新配置(如Grbl的
5. 限位开关与干扰排查
- 步骤1:限位开关测试
- 手动触发限位开关,观察系统是否立即停止并报警。
- 清洁触点或更换损坏的开关(推荐光电式限位)。
- 步骤2:信号隔离
- 将限位信号线与电机电源线分开走线,避免平行布线。
- 在信号线上加 磁环 或并联 0.1μF电容 滤波。
6. 电源与接地检查
- 步骤1:测量供电电压
- 确保驱动器输入电压稳定(如24V±10%),排除电压波动导致丢步。
- 步骤2:系统接地
- 使用独立接地桩,确保机床本体、控制系统、驱动器共地(接地电阻 < 4Ω)。
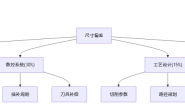
三、快速自检流程
- 机械检查 → 联轴器/丝杠是否松动?手动移动是否顺畅?
- 传感器测试 → 触发信号是否稳定?安装位置是否偏移?
- 空载归零 → 卸下刀具,观察是否仍位置不定?
- 干扰排查 → 信号线是否屏蔽?接地是否可靠?
四、典型故障案例
- 案例1:X轴每次归零偏移2-5mm
原因:联轴器螺丝松动,归零时丝杠打滑。
解决:紧固螺丝并涂螺纹胶,校准Steps/mm。 - 案例2:Z轴归零位置随机跳动
原因:原点传感器信号线受主轴变频器干扰。
解决:更换屏蔽线,传感器线绕开电源走线。 - 案例3:三轴归零后整体偏移
原因:电网电压波动导致驱动器丢步。
解决:加装稳压电源,调高驱动器电流。
五、预防措施
- 定期维护:每月检查机械紧固件、清洁传感器、校准参数。
- 参数备份:保存正确的Steps/mm、反向间隙等配置文件。
- 环境优化:保持车间温度稳定,避免丝杠热膨胀影响精度。
总结
- 优先级排查:
机械传动 > 原点传感器 > 驱动器设置 > 软件参数 > 干扰抑制 - 关键工具:万用表、百分表、螺丝刀、屏蔽线。
- 安全提示:调试时断开主轴电源,避免误动作!
若问题持续,可能是控制卡或电机编码器故障,建议联系设备厂家检测硬件。