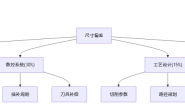
针对数控雕刻机在设置原点时出现 X轴或Y轴不定距离偏移 的问题,以下是系统性排查与解决方案:
一、核心原因分析
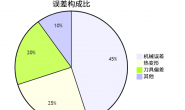
| 故障类型 | 具体表现 |
|---|---|
| 机械传动问题 | 丝杠/导轨磨损、联轴器松动、皮带打滑,导致归零时传动失准。 |
| 原点传感器异常 | 传感器信号不稳定、安装位置偏移或受干扰,触发位置随机变化。 |
| 电机/驱动器丢步 | 电流不足、细分错误或干扰,导致归零运动时实际位移与指令不符。 |
| 软件参数错误 | 脉冲当量(Steps/mm)不准确、归零速度/加速度过高,影响定位精度。 |
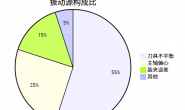
| 信号干扰 | 电机控制线或传感器信号线未屏蔽,电磁干扰导致位置信号异常。 |
二、详细解决方案
1. 检查机械传动系统
2. 校准原点传感器
- 步骤1:传感器信号测试
- 手动触发原点传感器,观察数控系统状态灯是否正常响应(如MACH3的输入指示灯)。
- 用万用表测量传感器信号线电压,触发时应有明显电平变化(如0V→5V)。
- 步骤2:调整安装位置
- 确保传感器与触发挡块的垂直距离在有效检测范围内(光电式通常为2-5mm)。
- 固定传感器螺丝,避免因振动导致位置偏移。
- 步骤3:更换传感器
- 若传感器信号不稳定,更换为同型号或抗干扰更强的 霍尔式/光电式传感器。
3. 优化电机与驱动器设置
- 步骤1:增加驱动器电流
- 步骤2:校准脉冲当量(Steps/mm)
- 公式:
Steps/mm = (电机每转步数 × 细分) / 丝杠导程
- 校准方法:
- 指令移动100mm(如
G0 X100),测量实际距离; - 计算误差并修正Steps/mm(例:实际移动95mm → 新Steps/mm = 原值 × 100/95)。
- 指令移动100mm(如
- 公式:
- 步骤3:降低归零速度与加速度
- 在数控软件中调整归零参数(如MACH3的
Motor Tuning):- 归零低速:300-800 mm/min
- 归零高速:1000-1500 mm/min
- 加速度:100-300 mm/s²
- 在数控软件中调整归零参数(如MACH3的
4. 排除信号干扰
- 步骤1:优化布线
- 电机信号线(PUL/DIR)使用 屏蔽双绞线,与电源线分开走线(间距>10cm)。
- 在信号线两端套 磁环,抑制高频干扰。
- 步骤2:可靠接地
- 确保数控系统、驱动器、机床本体共地,接地电阻 < 4Ω。
5. 软件与固件维护
- 步骤1:恢复出厂参数
- 备份后重置数控系统参数(如Grbl的
$RST=*命令)。
- 备份后重置数控系统参数(如Grbl的
- 步骤2:更新固件
- 访问设备厂商官网,下载最新固件并刷写(如Arduino CNC控制板)。
三、快速自检流程
四、典型故障案例
- 案例1:X轴归零时随机偏移1-3mm
原因:联轴器螺丝松动,归零时丝杠打滑。
解决:紧固螺丝并涂螺纹胶,校准Steps/mm。 - 案例2:Y轴归零位置波动
原因:原点传感器信号线未屏蔽,受变频器干扰。
解决:更换屏蔽线,传感器信号线绕开电源走线。 - 案例3:归零后原点逐渐偏移
原因:丝杠螺母磨损,反向间隙过大。
解决:更换丝杠螺母,在软件中设置反向间隙补偿。
五、预防措施
- 定期维护:每月检查机械紧固件、清洁传感器、校准Steps/mm。
- 参数备份:保存正确的Steps/mm、加速度等配置文件。
- 加工前测试:每次更换刀具或材料后,执行空跑归零验证。
总结
- 优先级排查:
机械传动 > 原点传感器 > 驱动器设置 > 信号干扰 > 软件参数 - 关键工具:万用表、螺丝刀、屏蔽线、润滑油。
- 安全提示:调试前断开主轴电源,避免误启动!
若问题仍未解决,可能是控制卡或电机编码器故障,建议联系设备厂家技术支持。