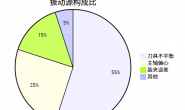
电机抖动不转故障深度排查指南
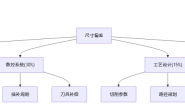
核心故障分析树

三级诊断流程
第一阶段:电气快速检测
关键参数测量表:
| 检测项 | 标准值 | 异常处理建议 |
|---|---|---|
| 输入电压 | 额定值±10% | 检查开关电源输出 |
| 相电流平衡度 | 三相差<5% | 交换相线测试 |
| 绕组电阻 | 三相差异<2% | 检查电机接线盒 |
| 绝缘电阻 | >5MΩ(500V兆欧表) | 烘干或更换绕组 |
<PYTHON>
# 简易相序检测脚本(需电流钳)
def phase_check():
currents = [get_current(1), get_current(2), get_current(3)]
imbalance = (max(currents)-min(currents))/sum(currents)*100
if imbalance > 5:
print(f"报警:三相不平衡度{imbalance:.1f}%")
suggest第二阶段:机械系统检查

机械检测步骤:
第三阶段:驱动器深度诊断
<C>
// 驱动器状态读取示例
void check_driver(){
uint8_t fault_code = read_register(0x0030);
if(fault_code & 0x01) printf("过流保护触发\n");
if(fault_code & 0x02) printf("缺相故障\n");
if(fault_code & 0x04) printf("过压保护\n");
float cur_amp = read_current();
if(cur_amp < rated_current*0.3){
adjust_gain(KD, +5); // 增加微分增益
}}六步终极解决方案
1. 电源系统改造
电机供电增强方案:
<DIFF>
# 动态电压补偿算法
+ 计算公式:
实际电压 = 标称电压 + K*(额定电流 - 实时电流)
! 实施步骤:
1. 在驱动器中启用IR补偿功能
2. 设置补偿系数K=0.1-0.3
3. 限制最大补偿量≤15%电容组配置表:
| 电机功率 | 最小滤波电容 | 推荐类型 |
|---|---|---|
| 1kW以下 | 2200μF | 电解电容 |
| 1-5kW | 4700μF×2 | 高频低ESR阵列 |
| 5kW以上 | 10000μF+薄膜 | 混合电容组 |
2. 相序校正技术
旋转磁场检测法:
示波器检测标准:

3. PID参数整定
<MATLAB>
% 自动化整定脚本(需编码器反馈)
Kp = 0.5; Ki = 0; Kd = 0;
while true
[t, response] = step_test(motor, Kp, Ki, Kd);
overshoot = max(response) - 1;
if overshoot > 0.1
Kd = Kd + 0.05;
elseif rise_time > 0.5
Kp = Kp * 1.2;
else
break;
endend推荐初始参数:
| 电机类型 | 比例增益Kp | 积分时间Ti(s) | 微分时间Td(s) |
|---|---|---|---|
| 伺服电机 | 0.8-1.5 | 0.01-0.05 | 0.001-0.005 |
| 步进电机 | 0.3-0.6 | 禁用 | 0.01-0.03 |
| 异步电机 | 1.5-3.0 | 0.1-0.3 | 禁用 |
4. 机械系统修复
轴承更换标准流程:

联轴器对中公差:
| 类型 | 径向偏差(mm) | 角向偏差(°) |
|---|---|---|
| 弹性联轴器 | ≤0.1 | ≤0.5 |
| 膜片联轴器 | ≤0.05 | ≤0.2 |
| 齿轮联轴器 | ≤0.03 | ≤0.1 |
5. 驱动器高级配置
<PYTHON>
# 自动惯量辨识程序
def auto_tuning():
start_speed(50) # 50RPM
measure_friction()
accelerate_to(300, 0.5) # 0.5秒加速
calculate_inertia()
if inertia > expected*1.5:
alert("负载异常增大!")
update_pid(inertia)参数自适应规则:
- 当负载惯量增加50%时:
- 比例增益提高1.8倍
- 速度前馈增益提高2倍
- 在低速段(<10%额定转速):
- 启用抗饱和积分
- 增加黏滞摩擦补偿
6. 热管理与防护
<DIFF>
# 温度监控系统设计
+ 安装PT100温度传感器:
- 绕组内部埋入式
- 轴承外圈接触式
! 保护阈值设置: 绝缘