多轴同步运动不同步是DIY雕刻机/CNC中非常棘手且影响加工精度的问题。这通常意味着在直线或圆弧插补运动(如G0/G1/G2/G3指令)中,两个或多个轴未能精确协调运动,导致路径偏离、轮廓失真、台阶感明显甚至丢步卡顿。以下是系统性的排查和解决思路:
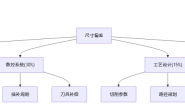
核心原因分类 & 解决方案
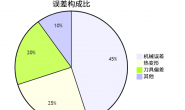
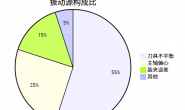
1. 机械结构问题 (基础不牢,地动山摇)
- 问题:
- 排查与解决:
- 手动测试: 完全断电,用手均匀用力尝试推动各运动轴。感受阻力是否明显不同?是否有卡顿、跳动感?重点比较需要同步的轴(如X和Y)。
- 目视检查: 检查导轨是否有划痕、锈蚀?滑块是否有损坏?同步带是否磨损、松弛?丝杠是否弯曲?联轴器螺丝是否紧固?
- 润滑: 对所有导轨、丝杠(如果是滑动丝杠)、轴承按规定使用合适的润滑脂/油进行充分润滑。
- 调整张力: 使用张力计或凭经验(能压下带中部一定距离)调整所有同步带的张力至一致且合适(过紧增加阻力磨损,过松导致打滑)。
- 更换损坏件: 更换磨损严重的同步带、损坏的滑块/轴承、弯曲的丝杠。
- 加固结构: 检查并加固机架连接点、电机安装座、Z轴结构等薄弱环节,增加支撑或使用更厚实的型材。
⚡ 2. 电气与驱动问题 (动力源不稳定)
- 问题:
- 排查与解决:
- 核对电机规格: 确认各轴电机扭矩是否足够(特别是Z轴提升、高速XY运动)。计算或参考经验值。
- 检查驱动器电流:
- 查阅电机规格书,确定合适的运行电流(通常为额定电流的60%-85%)。
- 检查并设置所有轴上驱动器的电流值一致且合适(通过跳线、拨码开关或软件配置)。使用万用表测量驱动器输出端电流(需谨慎操作)或观察电机温升(过烫说明电流可能过大,常温但无力说明可能过小)。
- 统一细分设置: 将所有轴上驱动器的细分设置调整为相同的值(如1/16, 1/32)。常用1/16或1/32。
- 检查供电:
- 测量电源在空载和满载(运行复杂路径)时的输出电压。满载时电压跌落不应过大(如48V系统不应低于42V)。
- 计算总功率需求:
(电机电流 * 电压 * 轴数) + 加热功率。确保电源额定功率有20%以上余量。升级电源。 - 检查电源输入电压是否达标(如标称24V/48V)。
- 缩短电机动力线长度,使用更粗线径(如18AWG或更大)。
- 散热: 确保驱动器散热良好,必要时加装散热风扇。
- 更换测试: 如有备用驱动器,尝试与怀疑有问题的轴互换,观察问题是否跟随驱动器转移。
3. 控制与配置问题 (软件指挥失误)
- 问题:
- 固件配置错误:
- 轴步数/毫米设置错误:
DEFAULT_AXIS_STEPS_PER_UNIT中某个轴的值计算错误或未校准,导致该轴实际移动距离与指令不符,积累误差破坏同步。这是最常见原因之一! - 电机方向设置错误:
INVERT_[X/Y/Z]_DIR设置错误导致某个轴反向运动(通常会被立即发现,但需检查)。 - 最大加速度/速度设置过高: 为系统整体或某个轴设置了超出机械能力的加速度或速度,导致该轴跟不上指令而丢步。
- 插补算法参数不当: (高级) 如Marlin中的
JUNCTION_DEVIATION或CLASSIC_JERK设置过于激进,导致在路径拐点处对某些轴要求瞬时过高加速度而丢步。
- 轴步数/毫米设置错误:
- 运动规划问题:
- 控制板性能不足: 复杂路径下(小线段很多),主控MCU(如Arduino Mega)处理不过来,导致运动指令发送卡顿、不连续。
- 通信延迟/错误: USB/UART通信不稳定(线缆差、干扰、波特率过高),导致G代码指令传输延迟或丢失。使用SD卡运行对比测试。
- 固件配置错误:
- 排查与解决:
- 校准轴步数/毫米:
- 检查方向: 通过控制软件手动点动各轴,确认运动方向符合预期(按+X按钮,刀具向+X方向移动)。若反向,修改固件
INVERT_[X/Y/Z]_DIR设置并重烧固件。 - 降低速度/加速度:
- 在控制软件(如Cura, LaserGRBL)或G代码开头(
M201 X[accel] Y[accel] Z[accel]/M203 X[speed] Y[speed] Z[speed])显著降低最大加速度和速度(如减半)。测试同步性是否改善。 - 如果改善,说明原设置过高。需逐步提高速度和加速度,找到机械系统在当前配置下的稳定极限。
- 确保各轴的最大加速度和速度设置合理且匹配(阻力大的轴如Z,其值应略低于XY)。
- 在控制软件(如Cura, LaserGRBL)或G代码开头(
- 调整插补参数:
- (Marlin) 尝试适当增大
JUNCTION_DEVIATION(如从0.01增大到0.02-0.05)或减小CLASSIC_JERK(如从8减小到5-6),使拐弯处更“圆滑”,降低瞬时加速度需求。修改后需重烧固件。
- (Marlin) 尝试适当增大
- 评估控制板性能:
- 运行包含大量微小线段的复杂图形(如密集网格、精细字体)。观察是否卡顿、不同步现象加剧。
- 考虑升级性能更强的主控板(如32位的SKR, Duet, MKS Robin,替代8位的Arduino Mega)。
- 检查通信:
- 尝试将G代码文件复制到SD卡,直接从主板SD卡运行。如果同步问题消失,则问题出在通信(USB/UART)。
- 更换质量好的USB线缆,确保连接牢固。
- 尝试降低串口波特率(如从115200降到57600或38400)。
- 远离可能的电磁干扰源。
4. 高级诊断与调优
- 示波器诊断:
- 启用步进失步检测:
- (需要固件和驱动器支持) 如Marlin的
STEPPER_DRIVER_ERROR_DETECTION功能(配合支持此功能的TMC驱动器如TMC2209)。当检测到失步时,固件会暂停并报错。非常有助于确认丢步是否发生及其频率。
- (需要固件和驱动器支持) 如Marlin的
- 精细调整电流与微步插值:
- 在保证电机不过热的前提下,微调增大 阻力较大或容易丢步的那个轴的驱动器电流(+5%-10%)。
- (TMC驱动器) 启用
StealthChop模式通常更安静,但高速性能可能不如SpreadCycle。尝试切换到SpreadCycle模式看是否改善高速同步性。 - (TMC2209/2660) 尝试启用
Microstep Interpolation(微步插值),驱动器内部将低细分(如1/16)插值为高细分(如1/256),可能提升运动平滑性。
排查流程建议
- 观察现象: 不同步出现在低速还是高速?是特定轴组合(如XY不同步 vs XZ不同步)?是特定方向?伴随异响或振动吗?记录清楚。
- 基础检查: 优先检查机械结构(润滑、张力、损坏)、电气连接(插头松动?)和基本配置(步数/mm、方向)。执行步数/mm校准!
- 简化测试: 运行简单的对角线运动(
G1 X100 Y100 F[速度]),从很低的速度(如200mm/min)开始,逐步提高速度,观察不同步出现的临界点。 - 负载测试: 空载运行正常后,尝试带负载(如实际雕刻/切割)测试,看负载是否诱发不同步。
- 隔离变量: 通过互换驱动器、电机(如果可能)、甚至改变运动指令方向,尝试将问题定位到具体轴或部件。
- 参数调整: 在确认基础无问题后,调整速度/加速度、插补参数、驱动器电流/模式。
- 升级硬件: 若以上步骤均无法解决且确定是瓶颈(如电源不足、主板性能弱、机械刚性差),考虑硬件升级。
总结
多轴同步问题往往是机械阻力不均、电气动力不足/不一致 和 控制参数不当 三者叠加的结果。务必从最基础的机械状态检查、步数/mm校准和驱动器电流设置开始排查! 耐心测试,逐一排除可能性。记住,降低速度和加速度通常是快速验证问题根源的有效方法。成功解决后,你的雕刻机将获得质的精度提升!