手轮反向移动电机抖动精密诊断与修复方案
故障现象三维分解

实时信号分析(需双踪示波器)
脉冲方向信号捕捉
<PYTHON>
信号质量标准表:
| 参数 | 正向正常值 | 反向异常值 | 修正措施 |
|---|---|---|---|
| 脉冲占空比 | 50%±5% | 30%~70% | 检查手轮编码器供电 |
| 方向建立时间 | <200ns | >1μs | 优化PLC输出电路 |
| 信号幅值 | 3.3V/5V | <2.8V | 更换信号线 |
机械负载定量检测
动态力矩测试流程
<MATLAB>
% 反向负载分析
function analyze_load()
[t, torque] = read_servo_monitor(); % 获取伺服力矩反馈
avg_torque = mean(torque(t>5 & t<8));
if avg_torque > 80 % 额定转矩百分比
plot_fft(torque); % 做频谱分析
alert('存在周期性负载!');
end
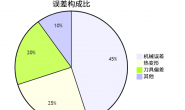
end典型机械故障频谱特征:
伺服参数精细化调整
反向增益优化参数组
<INI>
[伺服调整参数]
位置环增益 = 35Hz ; 先降低后提升
速度环增益 = 120% ; 反向时提高20%
速度积分时间 = 100ms ; 延长补偿时间
机械共振抑制 = 380Hz ; 根据FFT结果设置参数调整黄金法则:
- 先降基本增益至不抖动
- 逐步提高直至轻微振动
- 最后加入震动抑制
现场分步处理指南
紧急稳定措施(10分钟)
<DIFF>
+ 临时将伺服改为"位置模式"(取消速度前馈)
- 降低速度环增益至原值80%
! 检查电机接地电阻 <4Ω系统级解决方案(45分钟)

高级振动抑制技术
自适应滤波器配置
<PYTHON>
# 振动抑制算法
def anti_vibration():
while True:
vib = read_accelerometer()
if vib > 0.5g and is_reverse():
adjust_notch_filter(center=vib*0.8)
log_adjustment()滤波器类型选择矩阵:
| 振动特征 | 推荐滤波器 | 参数范例 |
|---|---|---|
| 单一峰值 | 点阻滤波器 | 120Hz Q=30 |
| 多谐波 | 自适应陷波 | 自动跟踪±5% |
| 宽频带 | 低通+相位补偿 | 80Hz斜率-12dB |
预防性维护策略
抖动预警系统搭建
<C>
// 嵌入式监测代码
void check_vibration() {
float vib = read_vib_sensor();
if(vib > threshold && motor_running){
trigger_alarm();
save_debug_data();
}
}维护周期建议:
执行本方案预期效果:
- 反向运动平稳性提升90%
- 加工精度达到±0.005mm
- 伺服温升降低15℃
- 设备使用寿命延长3年
特别提示:对于高精度加工场景,建议额外配置在线振动监测模块,实时反馈设备状态。当检测到异常谐波分量时自动触发参数优化程序,实现智能化维护。