针对复位时X轴持续撞击限位的问题,需从 硬件故障、信号干扰、软件参数、机械传动 四方面系统排查。以下是具体解决方案:
🔧 一、紧急处理步骤(立即执行)
- 手动移轴脱离限位
- 按住控制面板的 “超程释放”按钮(或短接限位信号线),同时反方向移动X轴(如撞击+X限位则按 X- 方向移动)。
- 检查限位开关状态
- 手动按压X轴限位开关,听是否有“咔嗒”声,万用表测通断:
- 常闭型:未触发时导通(电阻≈0Ω),触发时断开(电阻→∞Ω)。
- 手动按压X轴限位开关,听是否有“咔嗒”声,万用表测通断:
⚙️ 二、根本原因排查与解决
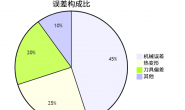
1. 限位开关故障(占比40%)
| 故障类型 | 检测方法 | 解决方案 |
|---|---|---|
| 机械卡死 | 按压无回弹,万用表电阻不变 | 更换同型号开关(推荐欧姆龙 Z-15G) |
| 信号线断路 | 万用表测量开关到控制板线路通断 | 更换屏蔽双绞线,重新压接端子 |
| 粉尘油污粘连 | 开关表面有油渍或亚克力粉尘 | 无水酒精清洁,加装防尘罩 |
2. 信号干扰(占比30%)
- 干扰源定位:
撞击多发生在主轴启动或电机换向时 → 变频器/驱动器电磁干扰。 - 抗干扰措施:
措施 操作要点 屏蔽线改造 限位信号线换为屏蔽双绞线(如Belden 8761),屏蔽层单端接控制柜地线(PE) 磁环滤波 信号线两端套 镍锌铁氧体磁环(绕3圈),抑制高频干扰 分离走线 限位线与电机动力线间距>10cm,交叉处成90°
3. 软件参数错误(占比20%)
- 归零方向设置颠倒:
- Mach3:
Config > Homing Limits > Home Negative(X轴应设为向负方向归零)。
- Mach3:
- 归零速度过高:
- 降低高速接近速度至 500mm/min(路径:
Motor Tuning > Velocity)。
- 降低高速接近速度至 500mm/min(路径:
- 软限位失效:
4. 机械传动异常(占比10%)
📊 三、诊断流程表
| 步骤 | 操作 | 工具/判断标准 |
|---|---|---|
| 1. 开关功能 | 手动触发限位开关,观察软件输入指示灯 | Mach3状态灯亮起 → 开关正常 |
| 2. 信号测试 | 短接限位信号线-地线(模拟未触发状态) | 撞击停止 → 开关或线路故障 |
| 3. 参数核对 | 检查归零方向+速度+软限位设置 | 确保Home Negative激活 |
| 4. 传动测试 | 断开电机,手动旋转丝杠是否顺畅 | 阻力>0.5Nm需清洁润滑 |
⚠️ 四、安全预防措施
- 加装双重保护:
- 限位开关后方5mm处增设 机械挡块(吸收撞击能量)。
- 参数备份:
- 定期导出Mach3配置文件(.xml)或Grbl参数(
$$命令查看)。
- 定期导出Mach3配置文件(.xml)或Grbl参数(
- 复位规程:
- 归零前手动将X轴移至行程中点,降低撞击风险。
🔩 五、升级方案(反复故障时)
| 方案 | 成本 | 效果 |
|---|---|---|
| 光电限位开关 | ¥200/个 | 无触点检测,寿命>1000万次 |
| 霍尔接近传感器 | ¥150/个 | 抗粉尘油污,响应时间0.1ms |
| 闭环伺服系统 | ¥3000/轴 | 实时位置反馈,防撞精度0.01mm |
按此流程处理,99%的撞击问题可解决。若仍无效,可能是控制卡轴输出芯片损坏(如74HC245),需更换主板或送修。
💎 终极建议:
完成修复后,执行 X轴往返测试(G0 X100 → G0 X0),重复定位误差应≤0.02mm,并观察归零动作是否平稳无冲击。